伺服电机的工作原理
发布日期:2024-09-29浏览次数:
回到文章开头,当Optimus接到一个拿起某电芯移动到指定位置并放下的指令时,为了完成这一动作,该指令会被传递至伺服系统,并利用闭环反馈控制回路,以惊人的速度和准确性调整相应伺服电机的旋转速度与扭矩,确保相应关节既平稳又精确的实现动作。接下来,本文将揭示伺服电机是如何在伺服系统的控制下工作的。
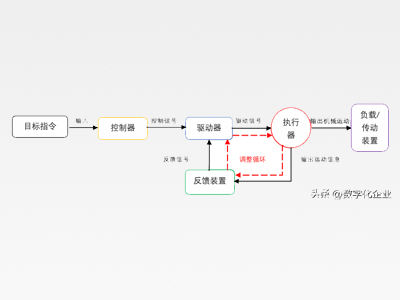
伺服系统通常由控制器、驱动器、执行器和反馈装置组成。其工作原理如图2所示。
图2 伺服系统运行流程图
● 当接收到目标指令后,控制器首先会传递控制信号给驱动器;
● 驱动器随之将控制信号转换为驱动信号传递给执行器;
● 执行器接收到驱动信号后,便开始机械运动,并输出运动信息给反馈装置。同时,反馈装置也开始向驱动器实时反馈执行器的运动信息;
● 驱动器比对反馈信号与控制信号后,继续向执行器输出调整后的驱动信号,执行器及时调整自身运动。如此循环,直到执行器输出目标指令所要求的机械运动。
至此,伺服系统便达到了根据目标指令来控制运动的目的。
总的来说,伺服系统是一种闭环反馈控制系统,它能够精确地控制执行器的位置、速度、加速度或其他参数,而伺服电机就是一种执行器,专门用于精确控制机械运动。